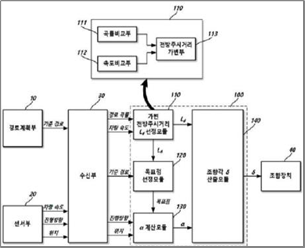
요약본 발명은 개선된 가변 전방주시거리를 이용한 자율이동체의 경로추종 장치 및 그 방법으로서, 자율이동체의 계획된 경로상의 기준 경로 정보와 주행환경에 따른 차량의 속도, 진행방향 및 위치를 포함하는 감지데이터로부터 도출된 차량의 경로 곡률( )과 차량속도( )를 기초로 전방주시거리 를 결정하는 가변 전방주시거리 선정모듈, 상기 기준 경로 정보와 상기 가변 전방주시거리 선정모듈에서 결정된 전방주시거리 로부터 목표점을 결정하는 목표점 선정모듈, 상기 진행방향 및 위치와 상기 목표점 선정모듈에서 결정된 목표점으로부터 값을 산출하는 계산모듈; 및 상기 전방주시거리 와 값으로부터 조향각 를 산출하여 산출된 조향각 데이터를 출력하는 조향각 산출모듈을 포함한다. 따라서, 본 발명은 전방주시거리 의 특성에 따라 자율이동체의 현재 속도와 기준 경로의 곡률을 고려하여 적절한 전방주시거리 값을 가지도록 함으로써 차량의 주행 안정성과 기준 경로에 대한 추종 성능을 향상시킬 수 있다.
대표 청구항자율이동체의 계획된 경로상의 기준 경로 정보와 주행환경에 따른 차량 속도, 진행방향 및 위치를 포함하는 감지데이터로부터 도출된 차량의 경로 곡률( )과 차량속도( )를 기초로 전방주시거리 를 결정하는 가변 전방주시거리 선정모듈; 상기 기준 경로 정보와 상기 가변 전방주시거리 선정모듈에서 결정된 전방주시거리 로부터 목표점을 결정하는 목표점 선정모듈; 상기 진행방향 및 위치와 상기 목표점 선정모듈에서 결정된 목표점으로부터 값을 산출하는 계산모듈; 및 상기 전방주시거리 와 값으로부터 조향각 를 산출하여 산출된 조향각 데이터를 출력하는 조향각 산출모듈을 포함하는, 개선된 가변 전방주시거리를 이용한 자율이동체의 경로추종 장치.